
装配
包装
SMT

高速率,高效率
高品质
物体运行速度2M/S (MAX)
25μm内完成拍照
10ms结果输出
250ms位置姿态调整完毕
10μm以内
在拾取物体放置到目标位置的运动过程中,拍摄物体实际位置进行位置校正。无需停止机械手臂的运动,
缩短运动周期,提高工作效率。
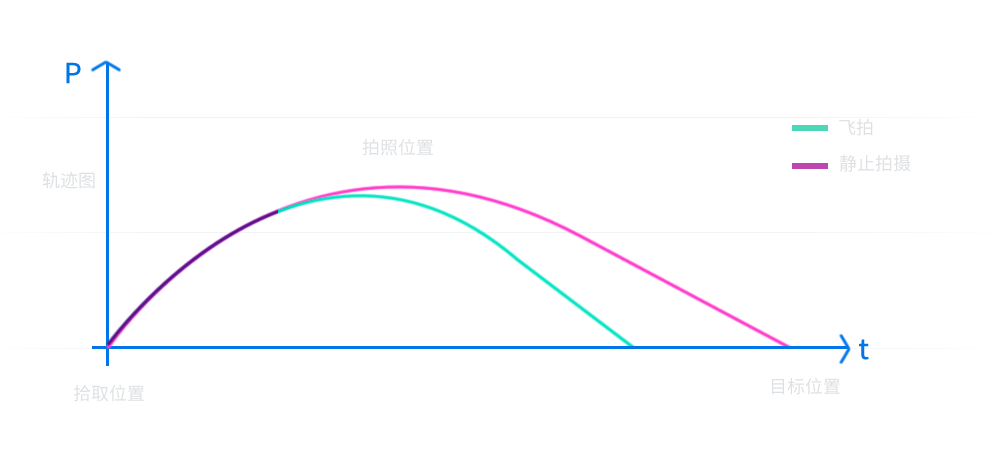
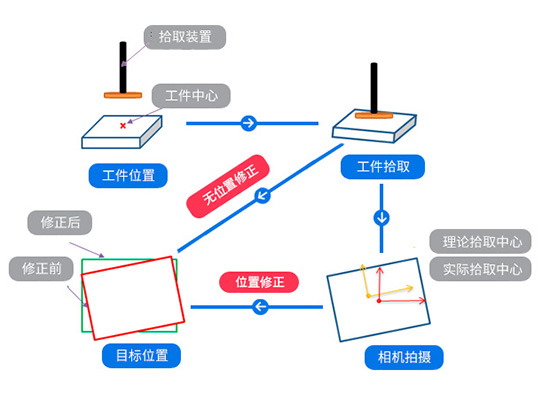
在工件拾取过程中,因机械臂的夹具或吸盘的瞬间作用使工件发生位置偏移,产生位置误差影响工件放置的精度。使用飞拍技术可以在物体运送的过程中,由相机自动拍摄物体的实际位置,对物体的实际位置进行二次修正,在保证运行速度的同时提高放置精度。

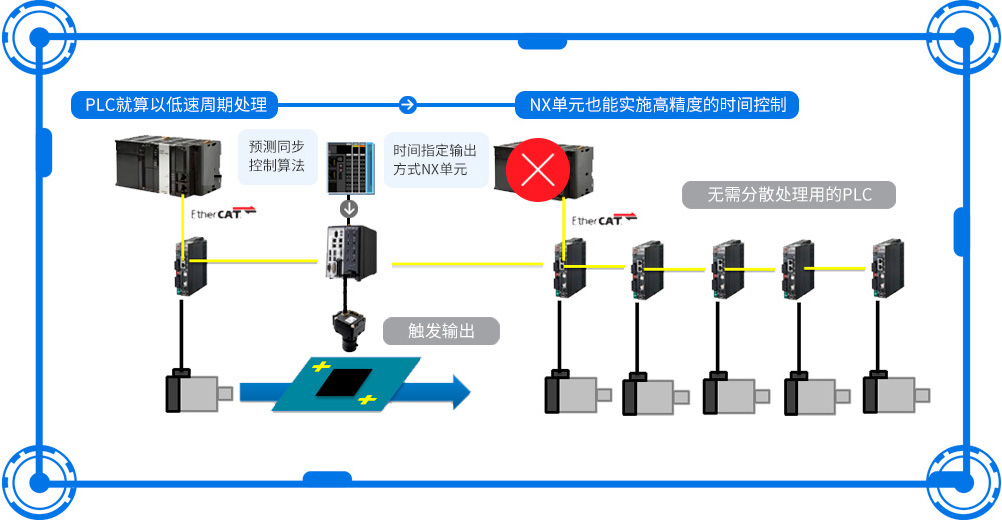
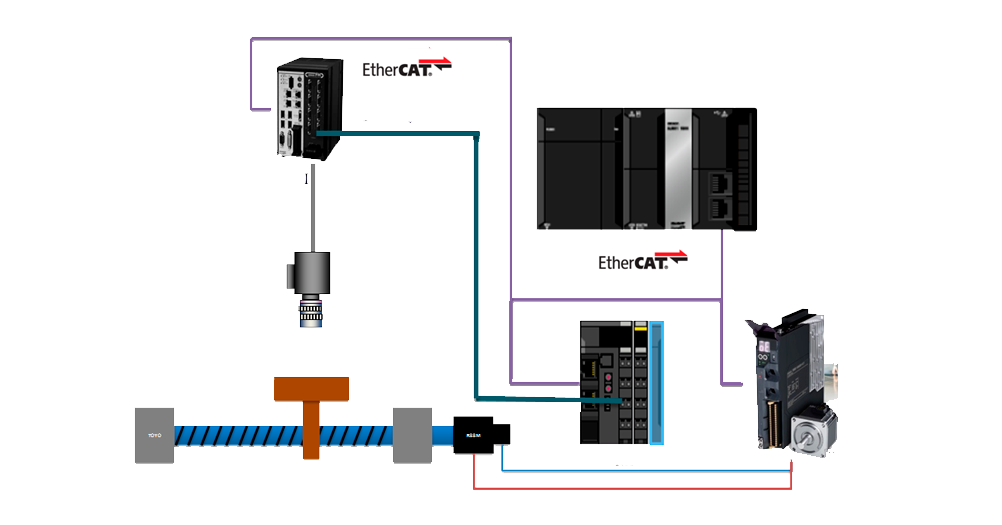
通过分散控制多台PLC,缩短了控制周期。
高成本化程序复杂化
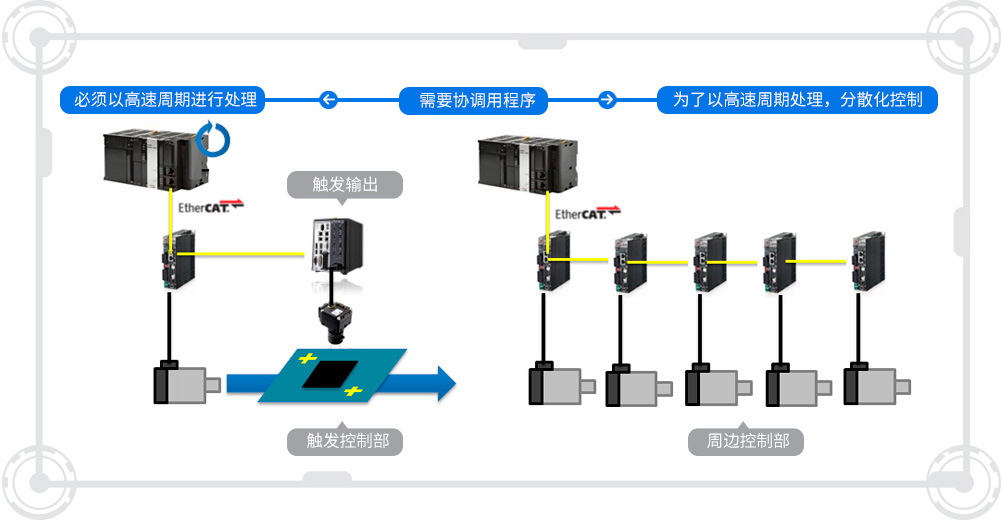
能通过单PLC进行控制能利用低性能PLC进行控制
低成本化程序简化
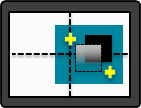
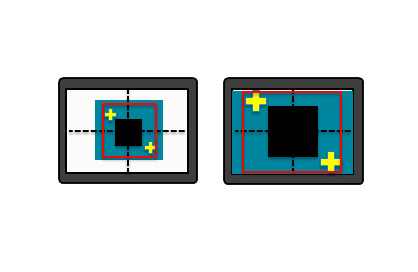
由于拍摄位置不稳定
扩大检查窗口
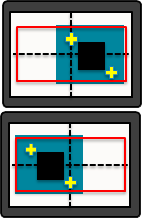
由于拍摄位置不稳定,
需要对检查窗口位置进行补偿
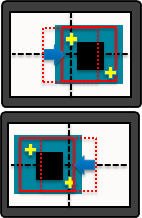
由于拍摄位置不稳定,
位置测量结果不作为绝对位置使用。
由图像内基准标记中的相对位置
值中计算绝对位置
图像处理的高速化画像処理是瓶颈工序的情况下,直接提高节拍时间。
强化像素分辨能力,提高检查精度。
能够简化程序能废除基准标记
不用停止检测对象,可以连续运行 拍摄校准标记 由校准标记位置进行零件搭载位置的处理
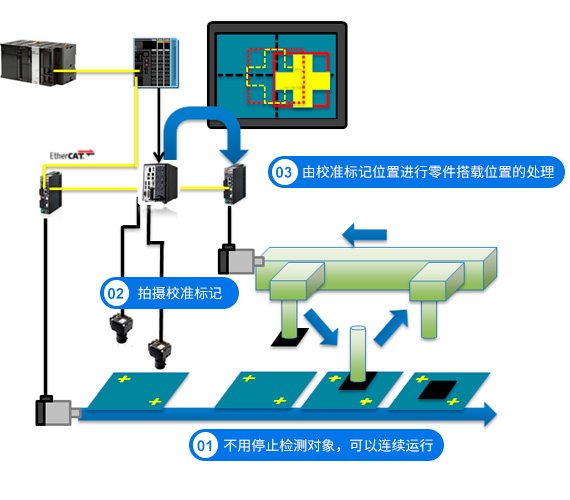
机械臂抓取芯片,移动至相机位置进行拍摄,以确认芯片的实际位置,位置校正后完成安装
为确保芯片组装的精度,需要在工件搬运过程中,预先通过相机拍摄工件位置,可是拍摄需要时间,往往造成设备不必要的停顿动作。
(中国)科技公司的飞拍技术,即使搬运速度再快,相机依然能够精准拍摄,并运算出正确的结果,最终完成高精度的芯片安装。

