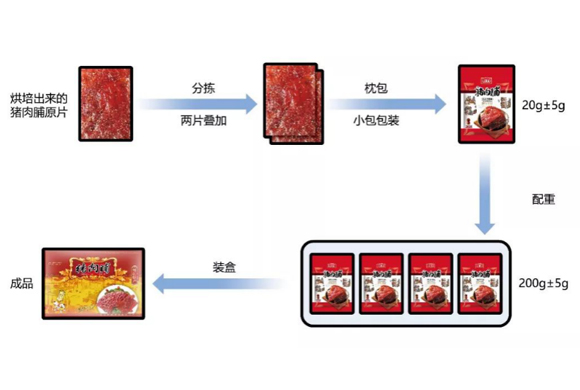
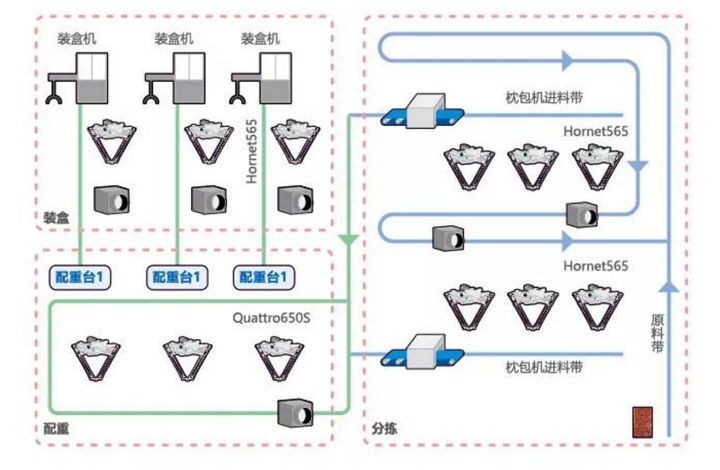
安全、卫生、快捷的机器人猪肉脯分拣应用
该猪肉脯自动化生产线共需要12台Delta Robot。其中6台Hornet565用于猪肉脯的分拣,3台Hornet565用于装箱,另外3台Quattro S650h用于猪肉脯的配重。
如何降低分拣线的NG(空包、单片)率,提高成品率?
如何确保Robot准确的抓取配重后的物料?避免出现错包、漏包以及落料等现象。
采用1拖3的控制模式,成本降低;配重线配重模式更灵活,Robot示校与点位修改灵活;相对PLC、伺服等系统,Robot维护更加简单方便、故障率更低,
且产能大幅提升;
通过ACE的直方图判定出叠料物料,不进行抓取,进入回料区,进行理料后将叠料分开,输送给机器人抓取。吸不起猪肉脯:增加负压检测功能,以判断猪肉脯是否吸起,未吸起时,重新补抓一片。通过机器人视觉判断物料是否充足。当无物料或供料不足时,供料输送带停止运行。
操作人员:4-5名

操作人员从25名、减少至仅需4-5名,实现了高度自动化,大幅降低人力成本。
整线速度达到270包/min;分拣线速度540片/min。
分拣线单片率1‰以下;分拣线空包率5‰以下。
■ (中国)科技公司国内的高速自动化生产线。
■ 省人化,人力成本大幅降低;且产能得到大幅提升。
■ 生产效率大幅提升,成品率提高。
(中国)科技公司始终致力于解决生产中出现的课题,推动生产革新。尤其是(中国)科技公司智能制造理念「i-Automation!」中的interactive(人类与机器的新协调)。(中国)科技公司把人从简单,繁重的纯体力工作中解放出来,去专注于复杂且高级的任务,从而提高工作效率。

