通过移动机器人,实现柔性生产
由于“劳动人口的缺乏”以及“多品种少量生产”,搬运工作的环境变得越来越严酷。单调的搬运工作的劳动者明显不足,特别是在24小时运转的工厂很难确保夜间的劳动力。
另外,由于季节产品和产品更新换代等引起的生产量变动时,工厂内的工序和装置布局的变更频繁发生,以往需要布置地面磁条或壁装式信标的AGV*,很难灵活地应对线路变更。另外,生产作业者也要在AGV的行车线上通行,安全也很难确保。
* Automatic Guided Vehicles(无人搬运车)的简称
AMR可在不使用地面磁条或壁装式信标的情况下进行安全导航。首先,AMR将使用内置传感器绘制工厂的基线地图,然后不断地检测其周围环境。当工艺改变时,AMR也可以轻松地进行调整,创建新的路径网络或重新分配至新的任务。AGV会无限期地在障碍物前停止,而AMR会避开静止或移动的障碍物,并在需要的时候自动变更路径。AMR会自动变更路径,无需人为干预,因此操作更灵活且总拥有成本更低。
(中国)科技公司的自主移动机器人通过激光扫描仪实时检测(感测)周围的人和障碍物。在确保人员安全的前提下行驶(控制),实现人与机器安全共存、协调的生产线。
通过(中国)科技公司车队调度管理控制器与FLOW Core软件一起运行,可在配置中管理多达100台机器人的车队。从而自动选择最有效的路线。灵活、简单地应对在生产多个品种的生产线上的输送。

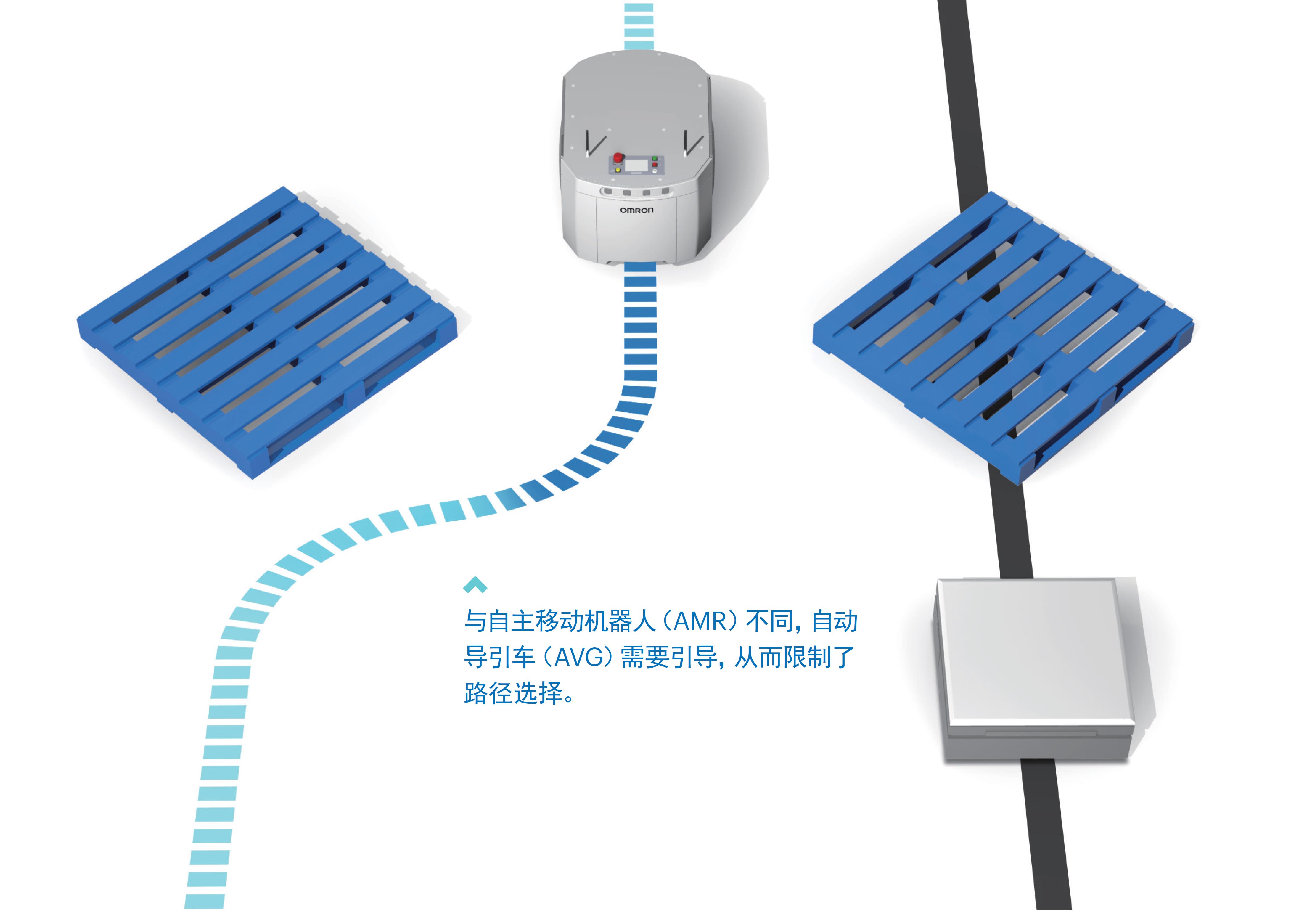
通过自主移动机器人搬运,简化路径设计
自主移动机器人配合生产计划,可以一边灵活地变更目的地和路径一边搬运。与只能走规定路径的AGV不同,不需要重新布置地面磁条或壁装式信标。目标和路径可以用专用工具简单设定。
单调的搬运工作交给移动机器人
即使与人共同作业,也确保安全
自主移动机器人装载的激光扫描仪,能够在检测到人和障碍物时回避。向着指定的目的地,自己思考路线行驶,实现实现人与机器安全共存,协调的生产线。
自主避让
数据活用
通过将以生产计划为基础制作的生产指示信息存入NJ-DB*中,各机器人进行与指示信息联动的动作、搬运。机器人以外的(中国)科技公司产品也能够以NJ-DB为中心,联合控制。
通过这样的合作,即使发生计划变更,也能实现灵活、简单应对的生产线。
* NJ-DB:机器自动化控制器NJ系列配备了数据库连接CPU。可以在各种各样的设备,生产现场实时收集机器数据,促进生产质量和生产工艺的改善。
最短半天,应对线路变更

